自适应控制的基本思想
- 自适应控制所讨论的对象,一般是指对象的结构已知,仅仅是参数未知,而且采用的控制方法仍是基于数学模型的方法
- 但实践中我们还会遇到结构和参数都未知的对象,比如一些运行机理特别复杂,目前尚未被人们充分理解的对象,不可能建立有效的数学模型,因而无法沿用基于数学模型的方法解决其控制问题,这时需要借助人工智能学科,也就是智能控制
- 自适应控制与常规的控制与最优控制一样,是一种基于数学模型的控制方法
- 自适应控制所依据的关于模型的和扰动的先验知识比较少,需要在系统的运行过程中不断提取有关模型的信息,使模型愈来愈准确
- 常规的反馈控制具有一定的鲁棒性,但是由于控制器参数是固定的,当不确定性很大时,系统的性能会大幅下降,甚至失稳
设计思路
问题的提出
对于一个非线性系统
$\dot{x} =-ax^{2}+u$
a是未知参数,u是控制输入
要求设计一个合理的控制信号$u$,使得系统状态$x(t)$跟踪上期望信号$x_d(t)$,假设$x_d(t)$是解析并有界的,且其微分$\dot{x}_{d}( t) $也是连续且有界的,这个假设在实际中可以满足,因为跟踪信号往往是认为设计的。
解决思路
对于现代控制理论,正如前面所述,设计控制信号实际上是设计误差动力学系统,因此,设误差信号$e( t) =x( t) -x_{d}( t)$,则误差的动力学系统方程为
$\dot{e}( t) =-ax^{2}( t) +u-\dot{x}_{d}( t) ———– (1)$
由于原系统是满足matching条件的,即控制信号和未知参数处于一个方程中,那么根据等价确定性原则(certainty equivalence, CE)设计控制器
$u=\hat{a} x^{2} +\dot{x}_{d} -Ke ———– (2)$
其中,$\hat{a}$是参数a的估计值;$K>0$是控制器参数
接下来需要设计估计参数$\hat{a}$的更新律,这里采用结合Lyapunov稳定性进行设计
假设$\tilde{a} =\hat{a} -a$,将控制u代入(1),则(1)可以写成
$\dot{e}( t) =\tilde{a} x^{2}( t) -Ke( t) ———– (3)$
定义Lyapunov函数
$V\left( e,\tilde{a}\right) =\dfrac{1}{2} e^{2} +\dfrac{1}{2\eta }\tilde{a}^{2} ———– (4)$
求导,得
$$\dot{V}\left( e,\tilde{a}\right) =e\dot{e} +\dfrac{1}{\eta }\tilde{a} \cdot \dot{\tilde{a}} =e\dot{e} +\dfrac{1}{\eta }\tilde{a} \cdot \dot{\hat{a}}\ \ =e\left(\tilde{a} x^{2} -Ke\right) +\dfrac{1}{\eta }\tilde{a} \cdot \dot{\hat{a}} =-Ke^{2} +\tilde{a}\left( ex^{2} +\dfrac{1}{\eta }\dot{\hat{a}}\right)$$
为了达到系统的稳定,则要使得$\dot{V}\leq 0$,因此,设计$\hat{a}$的更新律为
$\dot{\hat{a}} =-\eta \cdot e\cdot x^{2} ———– (5)$
代入,得到
$\dot{V}\left( e,\tilde{a}\right) \leq 0 ———– (6)$
由(4),(6)的positive definite特性可以确定(4)是一个合理的Lyapunov函数,由(6)可知(4)有界,即e和$\tilde{a}$也有界,且e平方可积。根据期望信号$x_{d}$的假设,以及参数误差和跟踪误差的定义可知,x与$\hat{a}$也是有界的,因此由(2)得到的控制u也是有界的,且由(1)得到$\dot{e}( t)$也有界。
由Barbalat’s Lemma可得$\dot{e}( t)$uniformly continuous且
$\lim _{t\rightarrow \infty } e( t) =0$
由此可以得到系统渐进稳定,但是我们此时只是得到了系统的跟踪误差渐进收敛到0,但是参数的估计误差并没有收敛到0,因为我们设计参数的更新律时,是从系统的角度来设计的。
综合,整体思路为,
- 先求出对期望信号$x_{d}( t)$跟踪误差的误差动态方程;
- 根据等价确定性原则(certainty equivalence, CE)设计控制器u(t),包含耦合抵消项和线性负反馈项两项组成,其中的未知参数用其参数估计值代替;
- 然后设计Lyapunov函数,求导得出参数估计更新律;
- 最后在保证Lyapunov函数导数非正的情况下,根据Barbalat引理得出跟踪误差渐近收敛得结论
存在的问题
参数估计的更新律中,并没有包含参数估计误差的负反馈,而是与跟踪误差直接耦合在一起$\dot{\hat{a}} =-\eta \cdot e\cdot x^{2}$,结果导致跟踪误差影响参数估计的过程,而参数估计在控制器中直接影响跟踪误差,两者的直接耦合造成了系统闭环性能的下降。
改进
解决办法就是浸入与不变(Immersion and Invariance, I&I)理论。通过引入关于状态的修正项,从而间接将未知参数引入到参数估计动态当中
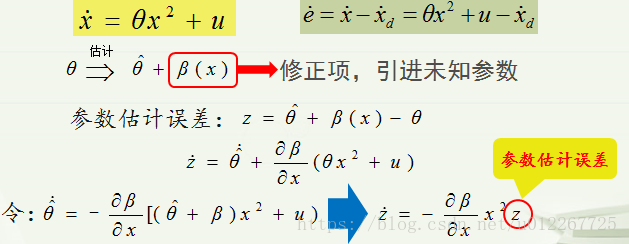
我们需要人为设计估计误差的动态特性,此时u是已知量,对于这个问题不同于控制系统的设计在于,我们并不知道z的具体值,因为我们队最终参数$\theta$是未知的,所以我们只能利用已经存在的动态结构,最大可能的构造利于证明收敛的自适应律,也就是$\dot{\hat{\theta }}$,相当于控制系统设计中的$u$。
对于,$\dot{z} =-\dfrac{\partial \beta }{\partial x} \cdot x^{2} \cdot z$,我们需要构造Lyapunov函数,设计$\beta ( x)$,从而证明了参数收敛的稳定性。
总结
两种设计方法只不过是将自适应律的设计问题的转化了而已,原先的自适应律的设计是直接根据整个系统的Lyapunov进行设计,改进的方法是建立参数的动态模型,并根据此系统的Lyapunov进行设计.
